
感知与AI语音算法
• 发达「⼩脑」实现运动姿态平衡
• 全⾝控制算法协调 12个关节⾃由度。

环境感知
• ⾃研三维重建算法
• 3D空间视觉模组
• 8⽶内深度信息精度1%
• 误差在1mm

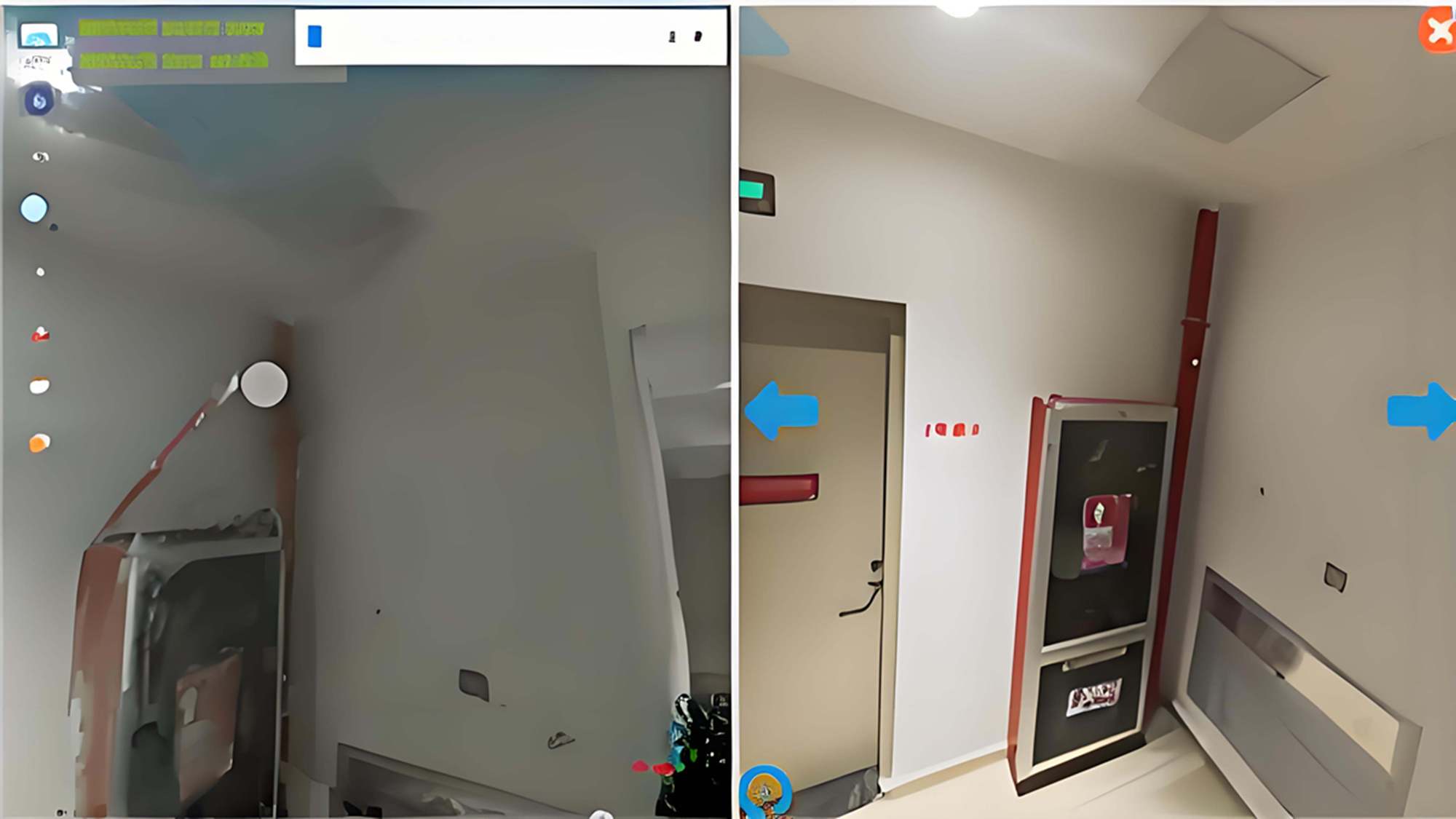
NewTon视觉空间系统
• 通过自研3D建模算法,构建NewTon空间视觉系统
• 在无法使用遥控器的场景,可以实现独立自主行走
机器人视觉
实景
二狗子EGou 技术参数
-
关键尺寸1000mm × 1000mm × 220mm
-
体重20kg
-
最⼤模组峰值扭矩200Nm
-
⾝体⾃由度(不包含手)12
-
时速8km/h